[1]:
import copy
import re
from dataclasses import dataclass
from functools import lru_cache
import matplotlib.pyplot as plt
import numpy as np
import numpy.random as rnd
from alns import ALNS
from alns.accept import HillClimbing
from alns.select import SegmentedRouletteWheel
from alns.stop import MaxIterations
[2]:
%matplotlib inline
[3]:
SEED = 42
The resource-constrained project scheduling problem
The goal of the RCPSP is to schedule a set of project activities \(V = \{ 0, 1, 2, \ldots, n \}\), such that the makespan of the project is minimised. Each activity \(i \in V\) has a duration \(d_i \in \mathbb{N}\). Precedence constraints impose that an activity \(i \in V\) can only start after all its predecessor activities have been completed. The precedence constraints are given by a set of edges \(E \subset V \times V\), where \((i, j) \in E\) means that \(i\) must be completed before \(j\) can commence. Resource constraints, on the other hand, impose that an activity can only be scheduled if sufficient resources are available. There are \(K = \{ 1, 2, \ldots, m \}\) renewable resources available, with \(R_k\) indicating the availability of resource \(k\). Each activity \(i \in V\) requires \(r_{ik}\) units of resource \(k\). A solution to the RCPSP is a schedule of activities \(S = \{ S_0, S_1, \ldots, S_n \}\), where \(S_i\) is the starting time of activity \(i\). The project starts at time \(S_0 = 0\), and completes at \(S_n\), where activities \(0\) and \(n\) are dummy activities that represent the start and completion of the project, respectively.
In this notebook, we solve an instance of the RCPSP using ALNS. In particular, we solve instance j9041_6 of the PSPLib benchmark suite. This instance consists of 90 jobs, and four resources. The optimal makespan of this instance is known to be between 123 and 135.
Data instance
We use the dataclass decorator to simplify our class representation a little.
[4]:
@dataclass(frozen=True)
class ProblemData:
num_jobs: int
num_resources: int
duration: np.ndarray # job durations
successors: list[list[int]] # job successors
predecessors: list[list[int]] # job predecessors
needs: np.ndarray # job resource needs
resources: np.ndarray # resource capacities
def __hash__(self) -> int:
return id(self)
@property
def first_job(self) -> int:
return 0
@property
def last_job(self) -> int:
return self.num_jobs - 1
@property
@lru_cache(1)
def all_predecessors(self) -> list[list[int]]:
pred = [set() for _ in range(self.num_jobs)]
for job, pre in enumerate(self.predecessors):
for p in pre:
pred[job] |= pred[p] | {p}
return [sorted(p) for p in pred]
@property
@lru_cache(1)
def all_successors(self) -> list[list[int]]:
succ = [set() for _ in range(self.num_jobs)]
for job, suc in zip(
reversed(range(self.num_jobs)), reversed(self.successors)
):
for s in suc:
succ[job] |= succ[s] | {s}
return [sorted(s) for s in succ]
@classmethod
def read_instance(cls, path: str) -> "ProblemData":
"""
Reads an instance of the RCPSP from a file.
Assumes the data is in the PSPLib format.
Loosely based on:
https://github.com/baobabsoluciones/hackathonbaobab2020.
"""
with open(path) as fh:
lines = fh.readlines()
prec_idx = lines.index("PRECEDENCE RELATIONS:\n")
req_idx = lines.index("REQUESTS/DURATIONS:\n")
avail_idx = lines.index("RESOURCEAVAILABILITIES:\n")
successors = []
for line in lines[prec_idx + 2 : req_idx - 1]:
_, _, modes, num_succ, *jobs, _ = re.split("\s+", line)
successors.append(list(map(lambda x: int(x) - 1, jobs)))
predecessors = [[] for _ in range(len(successors))]
for job in range(len(successors)):
for succ in successors[job]:
predecessors[succ].append(job)
needs = []
durations = []
for line in lines[req_idx + 3 : avail_idx - 1]:
_, _, _, duration, *consumption, _ = re.split("\s+", line)
needs.append(list(map(int, consumption)))
durations.append(int(duration))
_, *avail, _ = re.split("\s+", lines[avail_idx + 2])
resources = list(map(int, avail))
return ProblemData(
len(durations),
len(resources),
np.array(durations),
successors,
predecessors,
np.array(needs),
np.array(resources),
)
[5]:
instance = ProblemData.read_instance("data/j9041_6.sm")
[6]:
DELTA = 0.75 # resource utilisation threshold
ITERS = 5_000
START_TRESH = 5 # start threshold for RRT
STEP = 20 / ITERS # step size for RRT
THETA = 0.9 # weight decay parameter
WEIGHTS = [25, 5, 1, 0] # weight scheme weights
SEG_LENGTH = 100 # weight scheme segment length
Q = int(0.2 * instance.num_jobs)
LB = 123 # lower bound on optimal makespan
UB = 135 # upper bound on optimal makespan
Solution state
[7]:
@lru_cache(32)
def schedule(jobs: tuple[int]) -> tuple[np.ndarray, np.ndarray]:
"""
Computes a serial schedule of the given list of jobs. See Figure 1
in Fleszar and Hindi (2004) for the algorithm. Returns the schedule,
and the resources used.
Fleszar, K. and K.S. Hindi. 2004. Solving the resource-constrained
project scheduling problem by a variable neighbourhood search.
_European Journal of Operational Research_. 155 (2): 402 -- 413.
"""
used = np.zeros((instance.duration.sum(), instance.num_resources))
sched = np.zeros(instance.num_jobs, dtype=int)
for job in jobs:
pred = instance.predecessors[job]
t = max(sched[pred] + instance.duration[pred], default=0)
needs = instance.needs[job]
duration = instance.duration[job]
# This efficiently determines the first feasible insertion point
# after t. We compute whether resources are available, and add the
# offset s of the first time sufficient are available for the
# duration of the job.
res_ok = np.all(used[t:] + needs <= instance.resources, axis=1)
for s in np.flatnonzero(res_ok):
if np.all(res_ok[s : s + duration]):
sched[job] = t + s
used[t + s : t + s + duration] += needs
break
return sched, used[: sched[instance.last_job]]
[8]:
class RcpspState:
"""
Solution state for the resource-constrained project scheduling problem.
We use a list representation of the scheduled jobs, where job i is
scheduled before j if i precedes j (i.e., the jobs are sorted
topologically).
"""
def __init__(self, jobs: list[int]):
self.jobs = jobs
def __copy__(self):
return RcpspState(self.jobs.copy())
@property
def indices(self) -> np.ndarray:
"""
Returns a mapping from job -> idx in the schedule. Unscheduled
jobs have index ``len(self.jobs)``.
"""
indices = np.full(instance.num_jobs, len(self.jobs), dtype=int)
for idx, job in enumerate(self.jobs):
indices[job] = idx
return indices
@property
def unscheduled(self) -> list[int]:
"""
All jobs that are not currently scheduled, in topological order.
"""
return sorted(set(range(instance.num_jobs)) - set(self.jobs))
def objective(self) -> int:
s, _ = schedule(tuple(self.jobs))
return s[instance.last_job]
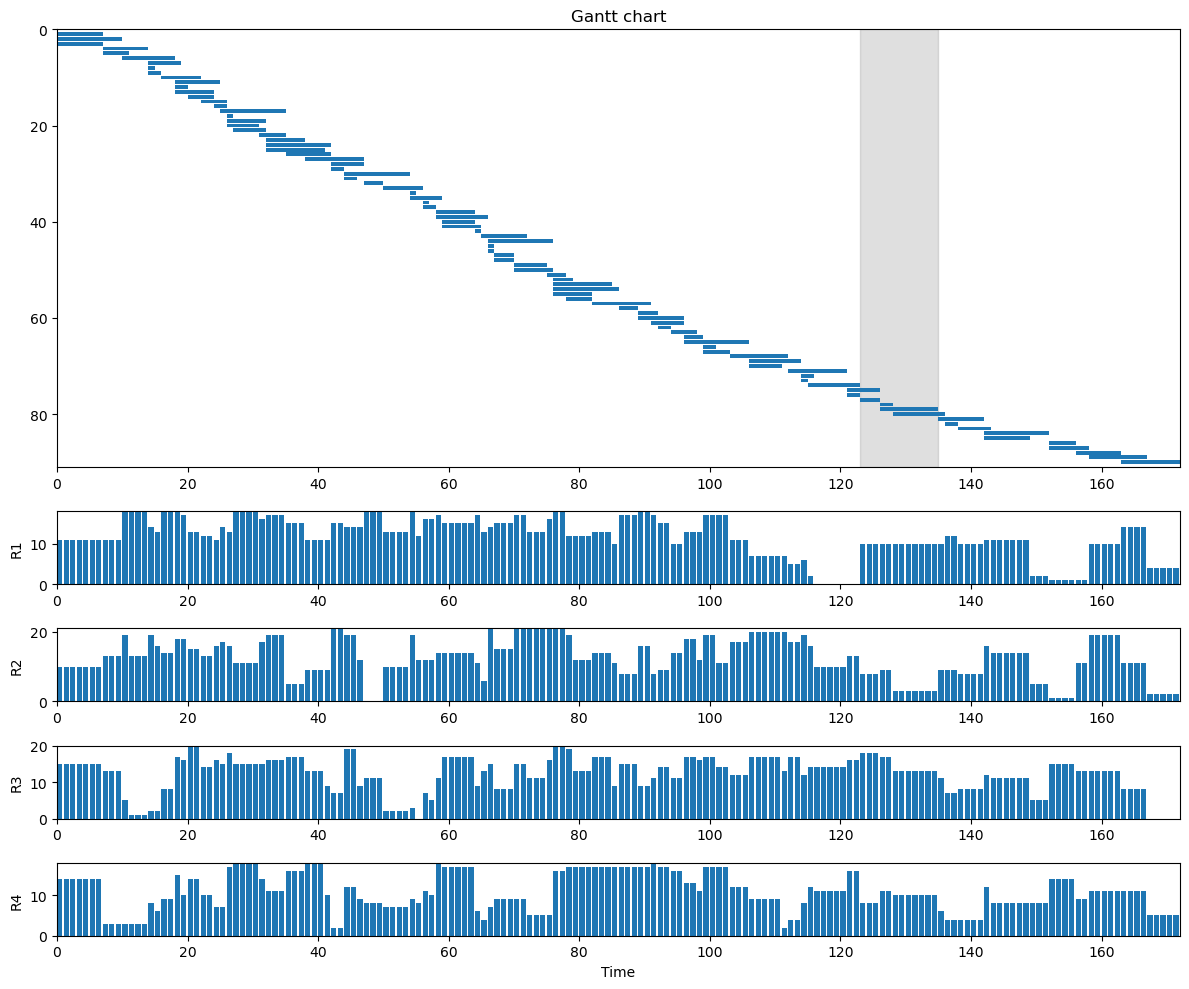
def plot(self):
"""
Plots the current schedule. The plot includes a Gantt chart, the
lower and upper bounds on an optimal makespan, and bar charts for
resource use.
"""
fig = plt.figure(figsize=(12, 6 + instance.num_resources))
hr = [1] * (instance.num_resources + 1)
hr[0] = 6
gs = plt.GridSpec(
nrows=1 + instance.num_resources, ncols=1, height_ratios=hr
)
s, u = schedule(tuple(self.jobs))
idcs = np.argsort(s)
gantt = fig.add_subplot(gs[0, 0])
gantt.axvspan(LB, UB, alpha=0.25, color="grey")
gantt.barh(
np.arange(instance.num_jobs), instance.duration[idcs], left=s[idcs]
)
gantt.set_xlim(0, self.objective())
gantt.set_ylim(0, instance.last_job)
gantt.invert_yaxis()
gantt.set_title("Gantt chart")
for res in range(instance.num_resources):
res_ax = fig.add_subplot(gs[res + 1, 0], sharex=gantt)
res_ax.bar(np.arange(u.shape[0]), u[:, res], align="edge")
res_ax.set_ylim(0, instance.resources[res])
res_ax.set_ylabel(f"R{res + 1}")
if res == instance.num_resources - 1:
res_ax.set_xlabel("Time")
plt.tight_layout()
Destroy operators
[9]:
def most_mobile_removal(state, rng):
"""
This operator unschedules those jobs that are most mobile, that is, those
that can be 'moved' most within the schedule, as determined by their
scheduled predecessors and successors. Based on Muller (2009).
Muller, LF. 2009. An Adaptive Large Neighborhood Search Algorithm
for the Resource-constrained Project Scheduling Problem. In _MIC
2009: The VIII Metaheuristics International Conference_.
"""
state = copy.copy(state)
indices = state.indices
# Left and right limits. These are the indices of the job's last
# predecessor and first successor in the schedule. That indicates
# the extent of the job's movement.
ll = np.array(
[
np.max(indices[instance.predecessors[job]], initial=0)
for job in range(instance.num_jobs)
]
)
rl = np.array(
[
np.min(
indices[instance.successors[job]], initial=instance.num_jobs
)
for job in range(instance.num_jobs)
]
)
mobility = np.maximum(rl - ll, 0)
mobility[[instance.first_job, instance.last_job]] = 0
p = mobility / mobility.sum()
for job in rng.choice(instance.num_jobs, Q, replace=False, p=p):
state.jobs.remove(job)
return state
[10]:
def non_peak_removal(state: RcpspState, rng):
"""
Removes up to Q jobs that are scheduled in periods with limited resource
use. Those jobs might be grouped together better when they are rescheduled.
Based on Muller (2009).
Muller, LF. 2009. An Adaptive Large Neighborhood Search Algorithm
for the Resource-constrained Project Scheduling Problem. In _MIC
2009: The VIII Metaheuristics International Conference_.
"""
state = copy.copy(state)
start, used = schedule(tuple(state.jobs))
end = start + instance.duration
# Computes a measure of resource utilisation in each period, and
# determines periods of high resource use.
used = used / instance.resources
high_util = np.argwhere(np.mean(used, axis=1) > DELTA)
# These are all non-peak jobs, that is, jobs that are completely
# scheduled in periods of limited resource use.
jobs = [
job
for job in range(instance.num_jobs)
if np.all((high_util <= start[job]) | (high_util >= end[job]))
]
for job in rng.choice(jobs, min(len(jobs), Q), replace=False):
state.jobs.remove(job)
return state
[11]:
def segment_removal(state, rng):
"""
Removes a whole segment of jobs from the current solution.
"""
state = copy.copy(state)
offset = rng.integers(1, instance.num_jobs - Q)
del state.jobs[offset : offset + Q]
return state
Repair operators
We only define a single repair operator: random_insert. This operator takes the unscheduled jobs, and randomly inserts them in feasible locations in the schedule. Together with a justification technique (shown below) that further improves the resulting schedule, this results in a new, hopefully improved solution.
[12]:
def justify(state):
"""
Helper method that double-justifies the schedule. Based on the
justification technique of Valls et al. (2005).
Valls, V. Ballestín, F. and S. Quintanilla. 2005. Jusitfication and
RCPSP: A technique that pays. _ European Journal of Operational
Research_. 165 (2): 375 -- 386.
"""
# We first right-justify the current schedule. That more or less means
# that we schedule jobs from the right.
bound = instance.duration.sum()
used = np.zeros((bound, instance.num_resources))
sched = np.zeros(instance.num_jobs, dtype=int)
for job in reversed(state.jobs):
needs = instance.needs[job]
duration = instance.duration[job]
t = min(sched[instance.successors[job]], default=bound)
res_ok = np.all(used[:t] + needs <= instance.resources, axis=1)
for s in reversed(np.flatnonzero(res_ok[: t - duration + 1])):
if np.all(res_ok[s : s + duration]):
sched[job] = s
used[s : s + duration, :] += needs
break
# Right-justify the schedule, and then left-justify it again. This
# results in a double-justified schedule that is hopefully better
# than what we got initially.
right_justified = np.argsort(sched)
sched, _ = schedule(tuple(right_justified))
left_justified = np.argsort(sched).tolist()
return RcpspState(left_justified)
[13]:
def random_insert(state, rng):
"""
Randomly inserts jobs into the schedule. The resulting solution state
is guaranteed to be feasible.
"""
indices = state.indices
preds = instance.all_predecessors
succs = instance.all_successors
for job in state.unscheduled:
# Left and right insertion limits. The job must be inserted
# between these indices - the interval is [ll, rl).
ll = np.max(indices[preds[job]], initial=-1) + 1
rl = np.min(indices[succs[job]], initial=len(state.jobs))
idx = rng.integers(ll, rl) if ll < rl else ll
state.jobs.insert(idx, job)
indices[indices >= idx] += 1
indices[job] = idx
return justify(state)
Initial solution
Our solution representation is a list of jobs. We can thus easily generate an initial solution as the list of all jobs, in the (topological) order we got them.
[14]:
init_sol = RcpspState(list(range(instance.num_jobs)))
print(f"Initial solution has objective {init_sol.objective()}.")
Initial solution has objective 172.
[15]:
init_sol.plot()
Heuristic solution
With our initial solution in hand, we can now use ALNS to further improve it. We use a segmented roulette wheel operator selection strategy, and a simple hill-climbing acceptance criterion.
[16]:
rng = rnd.default_rng(SEED)
[17]:
alns = ALNS(rng)
alns.add_destroy_operator(most_mobile_removal)
alns.add_destroy_operator(non_peak_removal)
alns.add_destroy_operator(segment_removal)
alns.add_repair_operator(random_insert)
[18]:
select = SegmentedRouletteWheel(WEIGHTS, THETA, SEG_LENGTH, 3, 1)
accept = HillClimbing()
stop = MaxIterations(ITERS)
res = alns.iterate(init_sol, select, accept, stop)
sol = res.best_state
print(f"Heuristic solution has objective {sol.objective()}.")
Heuristic solution has objective 141.
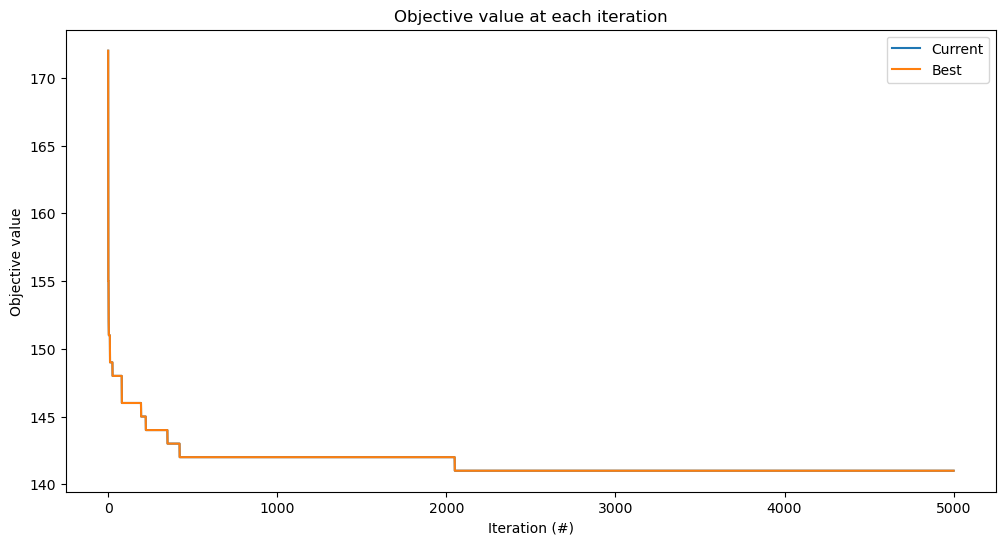
[19]:
_, ax = plt.subplots(figsize=(12, 6))
res.plot_objectives(ax=ax)
[20]:
sol.plot()
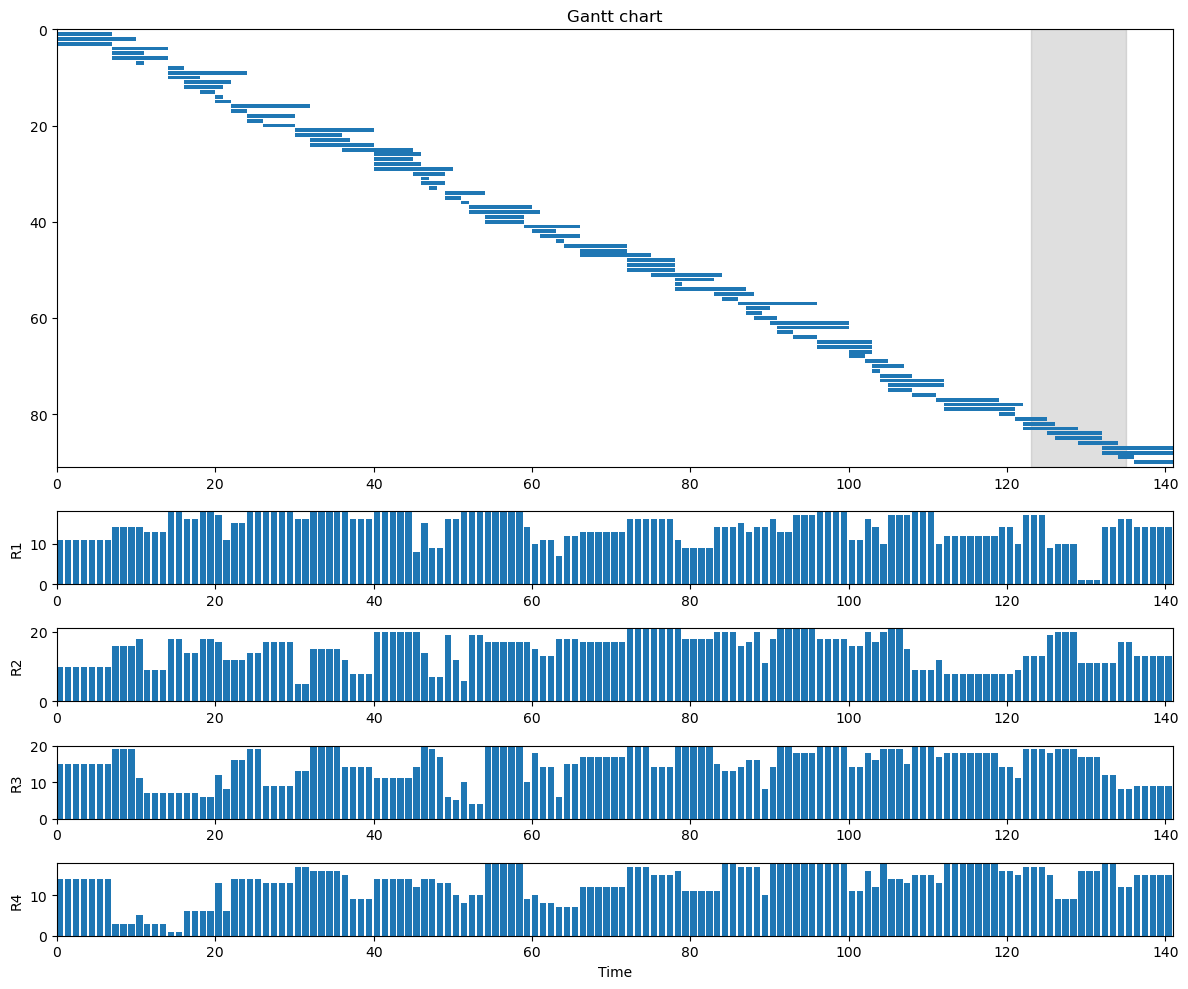
Conclusion
In this notebook we solved a challenging instance of the resource-constrained project scheduling problem, using several operators and enhancement techniques from the literature. The resulting heuristic solution is competitive with other heuristics for this problem: the best known solution achieves a makespan of 135, and we find 142, just 5% higher.